🧊 Toy model: infering the size of a cube galaxy from the inside#
written by Tristan Cantat-Gaudin - last edit 2023-10-27
Toy model: imagine we are inside a cube-shaped galaxy with edge length \(a\). The positions of the stars in \((X,Y,Z)\) cartesian coordinates are all limited to \([-\frac{a}{2},\frac{a}{2}]\).
For this exercise we don’t measure the distances to the stars, only their apparent position \((\ell,b)\) on the sky. We know we are sitting inside the cube, because there are stars all around us, and we know we are located 8 kpc from the centre of the cube. Can we estimate the size of the galaxy just by looking at the distribution of stars on the sky?
import daft
# Instantiate the PGM.
pgm = daft.PGM()
# Hierarchical parameters.
pgm.add_node("rsun", r"$r_{\odot}$", 4, 0.5, fixed=True)
pgm.add_node("a", r"$a$", 2, 2)
# Latent variable.
pgm.add_node("x", r"$X$", 1, 1)
pgm.add_node("y", r"$Y$", 2, 1)
pgm.add_node("z", r"$Z$", 3, 1)
# Data.
pgm.add_node("lb", r"$(\ell,b)$", 2, 0, observed=True)
# Add in the edges.
pgm.add_edge("rsun", "lb")
pgm.add_edge("x", "lb")
pgm.add_edge("y", "lb")
pgm.add_edge("z", "lb")
pgm.add_edge("a", "x")
pgm.add_edge("a", "y")
pgm.add_edge("a", "z")
# And a plate.
pgm.add_plate([0.5, -0.5, 3, 2], label=r"", shift=0.1)
# Render:
pgm.render();
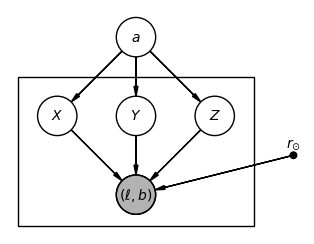
Inside the box: the sky positions \((\ell,b)\) are observed quantities: they are the pieces of information we have measured, and we will use to test our understanding of the Milky Way. The 3D positions \((X,Y,Z)\) are called latent variables: we don’t know them for individual stars, and we are not even trying to calculate them.
Outside the box: \(r_{\odot}\) is a fixed quantity. We believe we know the value of the distance to the Galactic centre to a good precision (at least compared to the other parameters) so we fix it to 8,kpc. The parameter \(a\) (edge length of the cube) is the only free parameter in this model.
Note: if we don’t know the distance to the Galactic centre then it is impossible to estimate the size of the cube by looking at positions alone. In the real Milky Way it turns out that measuring the distance to the Galactic centre is easier than estimating the overall shape of our Galaxy because the supermassive black hole Sgr A* is sitting right at the centre and emits strong radio emissions for which distances can be measured. Many studies of Milky Way structure use a fix value for the distance to the centre (approx. 8.2 kpc, GRAVITY collaboration 2019) so this part of exercise is not unrealistic.
Pick random points to create our simulated Galaxy:#
import numpy as np
np.random.seed(100)
nbStars = 10000
halfSizeCube = 20 #
x = np.random.uniform(low=-halfSizeCube,high=halfSizeCube, size=nbStars)
y = np.random.uniform(low=-halfSizeCube,high=halfSizeCube, size=nbStars)
z = np.random.uniform(low=-halfSizeCube,high=halfSizeCube, size=nbStars)
import matplotlib.pyplot as plt
from astropy.coordinates import SkyCoord
import astropy.coordinates as coord
import astropy.units as u
# convert to ICRS
all_stars = SkyCoord(x=x*u.kpc, y=y*u.kpc, z=z*u.kpc,
frame=coord.Galactocentric(galcen_distance=8*u.kpc,z_sun=0*u.kpc), representation_type='cartesian', differential_type='cartesian')
all_stars_ICRS = all_stars.transform_to(coord.ICRS)
all_stars_Galactic = all_stars.transform_to(coord.Galactic)
# The stars have a distance attribute now!
plt.figure(figsize=(5,5))
plt.scatter( x , y , s=1 )
plt.scatter([-8],[0],c='r')
plt.xlabel('x (kpc)')
plt.ylabel('y (kpc)')
plt.title('red dot indicates Sun position\nGalactic centre is at (X,Y)=(0,0)');

This is what our cube Galaxy would look like on the sky:
plt.figure(figsize=(12,4))
plt.subplot(121)
plt.scatter( all_stars_ICRS.ra.value, all_stars_ICRS.dec.value, c=all_stars_ICRS.distance.value, s=1 )
plt.xlabel('ra (degrees)'); plt.ylabel('dec (degrees)')
plt.colorbar(label='distance (kpc)')
plt.xlim(360,0)
plt.ylim(-90,90)
plt.subplot(122)
plt.scatter( all_stars_Galactic.l.value, all_stars_Galactic.b.value, c=all_stars_Galactic.distance.value, s=1 )
plt.scatter( all_stars_Galactic.l.value - 360 , all_stars_Galactic.b.value, c=all_stars_Galactic.distance.value, s=1 )
plt.xlim(180,-180)
plt.ylim(-90,90)
plt.xlabel('$\ell$ (degrees)'); plt.ylabel('$b$ (degrees)')
plt.colorbar(label='distance (kpc)')
plt.suptitle('the view from inside a simulated cube galaxy');

Writing down the likelihood#
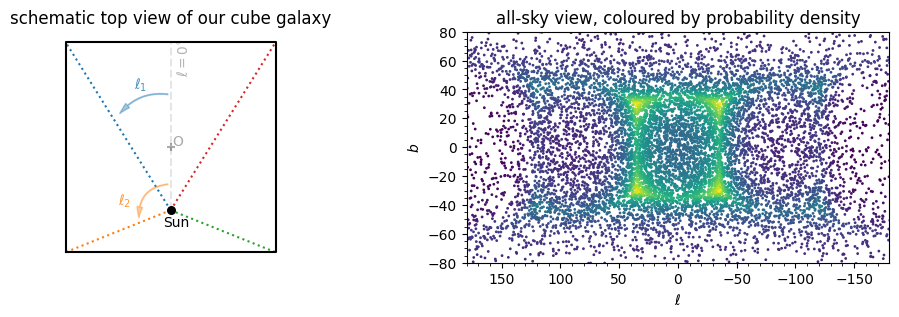
We are going to estimate the size of the cube galaxy through a maximum-likelihood approach. For any given size \(a\), we can calculate a ‘’probability’’ that it can generate a star at location \((\ell,b)\) on the sky. The probability density at a given location on the sky can be calculated as the distance from the edge of the cube in that direction. The value of \(\ell\) tells us which face we are facing. In the next cell I define the function probability_density_cube to compute this probability density distribution.
In order to represent a probability density, this function must be normalised to 1: a star has a 100% probability of being somewhere on the sky. In mathematical terms, we need to calculate the integral of probability_density_cube over the whole sky. A lazy way to calculate this normalisation constant is to evaluate probability_density_cube at many locations (I will use healpix regions here) add up all the values.
Note: in a real-life situation you would probably use a model with an exponential disc, or a sum of different components, with astrophysical meaning. That model would generally be expressed in Galactic cylindrical coordinates, and you would need to take into account coordinate transformations and associated Jacobians to make it work. Here I chose a cube with hard edges, for which the likelihood is easier to write down.
import matplotlib.patches as patches # to add arrows
plt.figure(figsize=(12,3))
plt.subplot(121,aspect=1.)
plt.plot( [-1,1,1,-1,-1] , [-1,-1,1,1,-1] , 'k-' ) #cube outline
plt.scatter(0,0,marker='+',c='#aaaaaa') #galactic centre
plt.scatter(0,-0.6,s=30,c='k',zorder=10) # Sun
# dashed lines to corners
plt.plot([0,-1],[-0.6,1],':',c='C0',zorder=1)
plt.plot([0,-1],[-0.6,-1],':',c='C1',zorder=1)
plt.plot([0,1],[-0.6,-1],':',c='C2',zorder=1)
plt.plot([0,1],[-0.6,1],':',c='C3',zorder=1)
plt.axis('off')
plt.title('schematic top view of our cube galaxy')
# annotations
plt.text(0.02,0.02,'O',c='#aaaaaa')
plt.text(-0.07,-0.75,'Sun')
plt.plot([0,0],[-0.6,1],'k--',alpha=0.1) # ell=0 line
plt.text(0.05,0.7,'$\ell=0^{\circ}$',rotation=90,alpha=0.3)
# arrow for ell_1
style = "Simple, tail_width=0.5, head_width=4, head_length=8"
kw = dict(arrowstyle=style, color="C0",alpha=0.4)
arrow_l = patches.FancyArrowPatch((0., 0.5), (-0.5, 0.3), connectionstyle="arc3,rad=.3", **kw)
plt.gca().add_patch(arrow_l)
plt.text(-0.35, 0.55,'$\ell_1$', color="C0",alpha=0.8)
# arrow for ell_2
style = "Simple, tail_width=0.5, head_width=4, head_length=8"
kw = dict(arrowstyle=style, color="C1",alpha=0.4)
arrow_l = patches.FancyArrowPatch((0., -0.35), (-0.3, -0.7), connectionstyle="arc3,rad=.5", **kw)
plt.gca().add_patch(arrow_l)
plt.text(-0.5, -0.55,'$\ell_2$', color="C1",alpha=0.8)
def probability_density_cube(l,b,a,Rsun=8):
"""Input:
l: Galactic longitude (in degrees)
b: Galactic latitude (in degrees)
a: size of the cube edge (in kpc)
Rsun: the distance to the Galactic centre
Output:
probability density at that location
This assumes the Sun is sitting at (X,Y,Z)=(-Rsun,0,0).
The cube extends from -a/2 to +a/2 in all three dimensions.
The function computes the distance to the cube wall in direction (l,b),
divided by the total volume of the cube.
"""
# Noting ell_1,2,3,4 the longitude of the four vertical vertices of the cube:
# (in degrees)
ell_1 = 360.*np.arctan( (a/2.)/((a/2.)+Rsun) )/(2*np.pi)
ell_2 = 180 - 360.*np.arctan( (a/2.)/((a/2.)-Rsun) )/(2*np.pi)
ell_3 = 360 - ell_2
ell_4 = 360 - ell_1
# print(ell_1,ell_2,ell_3,ell_4)
# first calculate the horizontal distance dH to the wall we are facing:
if l<ell_1: #front face
dH = (Rsun + a/2.) / np.cos(np.radians(l))
elif l<ell_2:
dH = (a/2.) / np.cos( np.radians(90-l))
elif l<ell_3: #back face
dH = ((a/2.)-Rsun) / np.cos(np.radians(180-l))
elif l<ell_4:
dH = (a/2.) / np.cos( np.radians(90+l))
else: #front face
dH = (Rsun + a/2.) / np.cos(np.radians(l))
# then take latitude into account:
d = dH / np.cos(np.radians(b))
# finally, check if that particular line of sight hits the floor or ceiling of the cube:
if b==0:
return d**3
else:
d_ceiling_or_floor = np.abs((a/2.) / np.sin(np.radians(b)))
if (d<d_ceiling_or_floor):
return d**3
else:
return d_ceiling_or_floor**3
ddd = []
for iii in range(len(all_stars_Galactic.l.value)):
ddd.append( probability_density_cube(all_stars_Galactic.l.value[iii],all_stars_Galactic.b.value[iii],40) )
plt.subplot(122)
plt.scatter( all_stars_Galactic.l.value, all_stars_Galactic.b.value, c=ddd, s=1 )
plt.scatter( all_stars_Galactic.l.value - 360 , all_stars_Galactic.b.value, c=ddd, s=1 )
plt.xlim(180,-180)
plt.ylim(-80,80)
plt.xlabel('$\ell$'); plt.ylabel('$b$')
plt.minorticks_on()
plt.title('all-sky view, coloured by probability density');
Maximum likelihood estimation from positions \((\ell,b)\)#
We have a function 𝚙𝚛𝚘𝚋𝚊𝚋𝚒𝚕𝚒𝚝𝚢_𝚍𝚎𝚗𝚜𝚒𝚝𝚢_𝚌𝚞𝚋𝚎 that gives us, for a given choice of cube size \(a\), the probability density distribution as a function of \(\ell\) and \(b\):
And the combined likelihood is the product:
In practice computers don’t like it when you multiply thousands or millions of small values, so we calculate the sum of the logarithm of those small values:
If we calculate this quantity for different values of \(a\), we which values are more likely than others to be the correct model.
Note: There are more efficient ways of finding the best \(a\), especially in cases with many free parameters. If all you care about, scipy has modules to minimise/maximise functions. If your function has many variables and you want to explore all possible combinations, MCMC optimisation (e.g. emcee) works great. Here we are just going to try many different values of \(a\) and see which one produces the highest (log-)likelihood.
%%time
cube_sizes_to_try = np.arange(30,60,0.5)
# Build a grid of points over the sky, to later compute the normalisation:
import healpy as hp
order = 6
nside = hp.order2nside(order)
npix = hp.order2npix(order)
ipix = np.arange(npix)
l_hpx, b_hpx = hp.pix2ang(nside, ipix, lonlat=True)
all_log_L = []
for cubeSize in cube_sizes_to_try:
density_on_grid = []
# compute the normalisation constant:
for ll_hpx,bb_hpx in zip(l_hpx, b_hpx):
p_grid = probability_density_cube(ll_hpx, bb_hpx,cubeSize,Rsun=8)
density_on_grid.append( p_grid )
norm_constant = sum(density_on_grid)
# compute the likelihood for all stars one by one:
log_p = []
for iii in range(len(all_stars_Galactic.l.value)):
p = probability_density_cube(all_stars_Galactic.l.value[iii],all_stars_Galactic.b.value[iii],cubeSize,Rsun=8)
log_p.append( np.log(p/norm_constant) )
all_log_L.append( sum(log_p) )
if cubeSize%5==0:
print(cubeSize,norm_constant,sum(log_p))
all_log_L = np.array(all_log_L)
plt.figure(figsize=(8,4))
plt.subplot(121)
plt.scatter( cube_sizes_to_try , all_log_L )
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
imax = np.argmax(all_log_L)
plt.subplot(122)
plt.scatter( cube_sizes_to_try[imax-4:imax+5] , all_log_L[imax-4:imax+5] )
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
plt.suptitle('result obtained with the complete simulated sample\n(true value: %.2f kpc)' % (2*halfSizeCube))
plt.tight_layout()
30.0 316829973.38885546 -106286.01156802248
35.0 503122323.9348422 -105979.86632418261
40.0 750992110.8696713 -105907.59456255619
45.0 1069285435.7912118 -105932.13663716316
50.0 1466789988.6878312 -105995.42518501406
55.0 1952268279.7793093 -106072.3044651955
CPU times: user 43.7 s, sys: 156 ms, total: 43.8 s
Wall time: 43.6 s

What if our data is incomplete?#
We are going to remove part of our data, to simulate the fact that some parts of the sky might be more complete than others. For this example I use the selection function model of Gaia DR3, computed at magnitude \(G=21\). In real life, the completeness often also depends on magnitude, but here I just assume that the completeness depends on the location on the sky.
from gaiaunlimited.selectionfunctions import DR3SelectionFunctionTCG
mapHpx7 = DR3SelectionFunctionTCG()
gmag = 21.2
all_gmag = gmag*np.ones_like(all_stars_Galactic)
completeness = mapHpx7.query(all_stars_Galactic,all_gmag)
plt.figure(figsize=(8,8))
plt.subplot(311)
plt.scatter( all_stars_Galactic.l.value, all_stars_Galactic.b.value, c='k', s=1 )
plt.scatter( all_stars_Galactic.l.value - 360 , all_stars_Galactic.b.value, c='k', s=1 )
plt.xlim(180,-180)
plt.ylim(-80,80)
plt.ylabel('$b$ (degrees)')
plt.minorticks_on()
plt.subplot(312)
plt.scatter( all_stars_Galactic.l.value, all_stars_Galactic.b.value, c=completeness, s=1,vmin=0,vmax=1)
plt.scatter( all_stars_Galactic.l.value - 360 , all_stars_Galactic.b.value, c=completeness, s=1,vmin=0,vmax=1)
plt.xlim(180,-180)
plt.ylim(-80,80)
plt.ylabel('$b$ (degrees)')
plt.minorticks_on()
# - - - - remove some stars based on probability:
random_draw = np.random.uniform(low=0,high=1,size=len(all_gmag))
is_selected = random_draw < completeness
incomplete_stars = all_stars_Galactic[is_selected]
plt.subplot(313)
plt.scatter( incomplete_stars.l.value, incomplete_stars.b.value,
c='k', s=1 )
plt.scatter( incomplete_stars.l.value - 360 , incomplete_stars.b.value,
c='k', s=1 )
plt.xlim(180,-180)
plt.ylim(-80,80)
plt.xlabel('$\ell$ (degrees)'); plt.ylabel('$b$ (degrees)')
plt.minorticks_on()
plt.subplots_adjust(hspace=0)

The incompleteness distorted the apparent distribution of stars on the sky. If we apply the same maximum likelihood method as above, we will get the wrong answer!
%%time
all_log_L_biased = []
for cubeSize in cube_sizes_to_try:
density_on_grid = []
# compute the normalisation constant:
for ll_hpx,bb_hpx in zip(l_hpx, b_hpx):
p_grid = probability_density_cube(ll_hpx, bb_hpx,cubeSize,Rsun=8)
density_on_grid.append( p_grid )
norm_constant = sum(density_on_grid)
# compute the likelihood for all stars one by one:
log_p = []
for iii in range(len(incomplete_stars.l.value)):
p = probability_density_cube(incomplete_stars.l.value[iii],incomplete_stars.b.value[iii],cubeSize,Rsun=8)
log_p.append( np.log(p/norm_constant) )
all_log_L_biased.append( sum(log_p) )
if cubeSize%5==0:
print(cubeSize,norm_constant,sum(log_p))
all_log_L_biased = np.array(all_log_L_biased)
plt.figure(figsize=(8,4))
plt.subplot(121)
plt.scatter( cube_sizes_to_try , all_log_L_biased , c='r')
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
imax = np.argmax(all_log_L_biased)
plt.subplot(122)
plt.scatter( cube_sizes_to_try[imax-7:imax+7] , all_log_L_biased[imax-7:imax+7] , c='r')
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
plt.suptitle('result obtained by ignoring incompleteness\n(true value: %.2f kpc)' % (2*halfSizeCube))
plt.tight_layout()
30.0 316829973.38885546 -29344.975104751215
35.0 503122323.9348422 -29182.835411152857
40.0 750992110.8696713 -29114.791340513733
45.0 1069285435.7912118 -29088.777320304343
50.0 1466789988.6878312 -29081.59177119225
55.0 1952268279.7793093 -29082.663731874305
CPU times: user 31.4 s, sys: 144 ms, total: 31.5 s
Wall time: 31.6 s
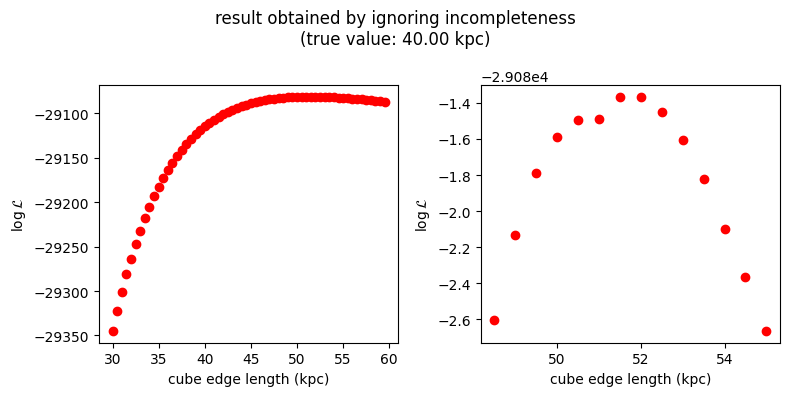
The procedure is now returning incorrect results! We know the cube size is 40 kpc, but the incomplete data makes the stellar distribution more homogeneous on the sky (because it is more incomplete in the parts of the sky with a higher true density), which mimicks the effect of the cube being larger.
%%time
# precompute the selection function at points on the grid
completeness_grid = mapHpx7.query(SkyCoord(l=l_hpx, b=b_hpx, unit="deg", frame="galactic"),
gmag*np.ones_like(l_hpx))
all_log_L_withsf = []
for cubeSize in cube_sizes_to_try:
density_on_grid = []
# compute the normalisation constant:
for iii,(ll_hpx,bb_hpx) in enumerate(zip(l_hpx, b_hpx)):
p_grid = probability_density_cube(ll_hpx, bb_hpx,cubeSize,Rsun=8)
density_on_grid.append( p_grid * completeness_grid[iii] )
norm_constant = sum(density_on_grid)
# compute the likelihood for all stars one by one:
log_p = []
for iii in range(len(incomplete_stars.l.value)):
p = probability_density_cube(incomplete_stars.l.value[iii],incomplete_stars.b.value[iii],cubeSize,Rsun=8)
p_sf = completeness[is_selected][iii]
log_p.append( np.log(p*p_sf/norm_constant) )
all_log_L_withsf.append( sum(log_p) )
if cubeSize%5==0:
print(cubeSize,norm_constant,sum(log_p))
all_log_L_withsf = np.array(all_log_L_withsf)
plt.figure(figsize=(8,4))
plt.subplot(121)
plt.scatter( cube_sizes_to_try , all_log_L_withsf , c='c')
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
imax = np.argmax(all_log_L_withsf)
plt.subplot(122)
plt.scatter( cube_sizes_to_try[imax-4:imax+5] , all_log_L_withsf[imax-4:imax+5] , c='c')
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
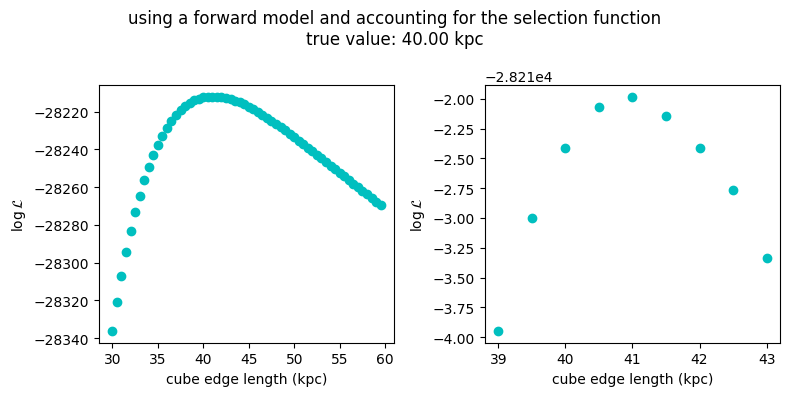
plt.suptitle('using a forward model and accounting for the selection function\ntrue value: %.2f kpc' % (2*halfSizeCube))
plt.tight_layout()
30.0 81483602.46232517 -28336.282743790205
35.0 132430391.85281473 -28237.42118866587
40.0 200816043.11599615 -28212.414267111824
45.0 289190360.5984642 -28217.36112678174
50.0 400085064.7191931 -28233.389282052754
55.0 535997898.4230762 -28252.30199528893
CPU times: user 37.5 s, sys: 98.3 ms, total: 37.6 s
Wall time: 37.5 s
Can I use the selection function to correct the data?#
No.
It is tempting, but in general you really shouldn’t do this.
# Use a larger healpix gris than above, to have less noise in corrected counts:
import healpy as hp
order = 5
nside = hp.order2nside(order)
npix = hp.order2npix(order)
ipix = np.arange(npix)
l_hpx, b_hpx = hp.pix2ang(nside, ipix, lonlat=True)
completeness_grid = mapHpx7.query(SkyCoord(l=l_hpx, b=b_hpx, unit="deg", frame="galactic"),
gmag*np.ones_like(l_hpx))
plt.figure(figsize=(8,9))
plt.subplot(321)
# count sources in each hpx:
ipix_true = hp.ang2pix(nside, all_stars_Galactic.l.value, all_stars_Galactic.b.value , lonlat=True)
counts_true = []
for iii in ipix:
counts_true.append( len(ipix_true[ipix_true==iii]) )
counts_true = np.array(counts_true)
hp.mollview(counts_true,hold=True,title='A) complete sample counts',cmap='magma')
plt.subplot(322)
hp.mollview(completeness_grid,hold=True,title='B) selection function',min=0,max=1)
plt.subplot(323)
# count sources in each hpx:
ipix_observed = hp.ang2pix(nside, incomplete_stars.l.value, incomplete_stars.b.value , lonlat=True)
counts_observed = []
for iii in ipix:
counts_observed.append( len(ipix_observed[ipix_observed==iii]) )
counts_observed = np.array(counts_observed)
hp.mollview(counts_observed,hold=True,title='C) observed counts',cmap='magma')
plt.subplot(324)
corrected_counts = counts_observed/completeness_grid
hp.mollview(corrected_counts,hold=True,title='D) corrected counts',
min=min(counts_true),max=max(counts_true),cmap='magma')
plt.subplot(325)
density_on_grid = []
# compute the normalisation constant:
for iii,(ll_hpx,bb_hpx) in enumerate(zip(l_hpx, b_hpx)):
p_grid = probability_density_cube(ll_hpx, bb_hpx,2*halfSizeCube,Rsun=8)
density_on_grid.append( p_grid*completeness_grid[iii] )
norm_constant = sum(density_on_grid)
hp.mollview(np.array(density_on_grid)/norm_constant,hold=True,title='E) model density (incomplete)',min=0,
cmap='magma')
plt.subplot(326)
density_on_grid = []
# compute the normalisation constant:
for ll_hpx,bb_hpx in zip(l_hpx, b_hpx):
p_grid = probability_density_cube(ll_hpx, bb_hpx,2*halfSizeCube,Rsun=8)
density_on_grid.append( p_grid )
norm_constant = sum(density_on_grid)
hp.mollview(np.array(density_on_grid)/norm_constant,hold=True,title='F) model density (complete)',min=0,
cmap='magma')
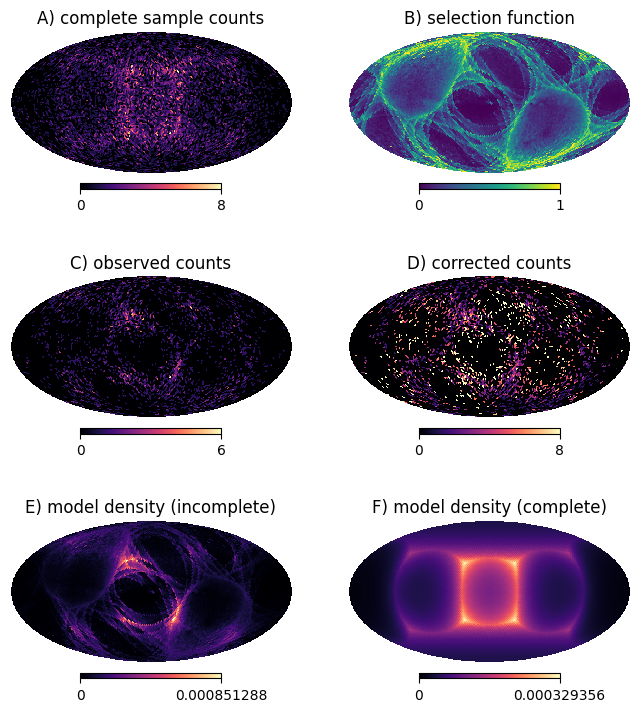
The correct way to select the best-fit model is to compare panel C to panel E, for different choices of cube size.
The “count correction” approach compares panel D to panel F. The are many reasons not to do that:
in regions that are so incomplete that you observe zero stars, the corrected number is still zero
in regions that are very incomplete and have a few stars, the corrected values are noisy
This can be mitigated by the use of larger bins, but:
when you bin your data you lose information
the “corrected count” will not be an integer, so you won’t be able to use mathematically sound tools like Poissonian statistics and you will have to take shortcuts
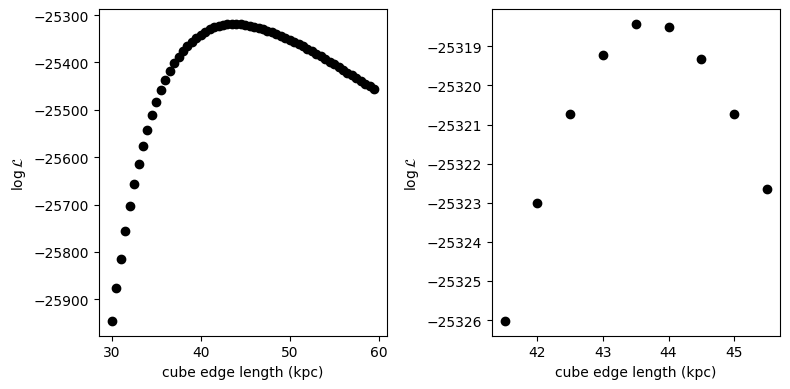
Note: In this notebook I randomly generate stars in my cube galaxy, then I randomly remove some of them to simulated incompleteness. The results can vary for each run, but the mathematically sound approach (forward modelling) always returns numbers close to the expected value, with a reasonable confidence interval. The correction approach tends to provide very peaked likelihoods (overestimating the precision) while peaking at the wrong value. In some unfortunate cases where corrections amplify noise too much, the likelihood may even diverge.
Let’s ignore the warnings and do the wrong thing anyway!#
%%time
from scipy.stats import poisson
# round counts to nearest integer:
corrected_counts = (np.rint(corrected_counts)).astype(int)
all_log_L_correctedcounts = []
for cubeSize in cube_sizes_to_try:
expected_counts = []
for ll_hpx,bb_hpx in zip(l_hpx, b_hpx):
p_grid = probability_density_cube(ll_hpx, bb_hpx,cubeSize)
expected_counts.append( p_grid )
# normalise the prediction so it contains the same number of stars as the observation:
expected_counts = np.array(expected_counts) / np.sum(expected_counts)
expected_counts = expected_counts * sum(corrected_counts)
# log-likelihood for small counts:
logL = sum([poisson.logpmf(ccc, eee) for ccc,eee in zip(corrected_counts,expected_counts) ])
all_log_L_correctedcounts.append( logL )
if cubeSize%5==0:
print(cubeSize,logL)
all_log_L_correctedcounts = np.array(all_log_L_correctedcounts)
plt.figure(figsize=(8,4))
plt.subplot(121)
plt.scatter( cube_sizes_to_try , all_log_L_correctedcounts , c='k')
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
imax = np.argmax(all_log_L_correctedcounts)
plt.subplot(122)
plt.scatter( cube_sizes_to_try[imax-4:imax+5] , all_log_L_correctedcounts[imax-4:imax+5] , c='k')
plt.xlabel('cube edge length (kpc)')
plt.ylabel('$\log \mathcal{L}$')
#plt.suptitle('using a forward model and account for the selection function\ntrue value: %.2f kpc' % (2*halfSizeCube))
plt.tight_layout()
30.0 -25945.656820776083
35.0 -25483.651326797415
40.0 -25341.17960383194
45.0 -25320.734629402406
50.0 -25351.696496546083
55.0 -25403.854536527168
CPU times: user 54.6 s, sys: 1.08 s, total: 55.7 s
Wall time: 55.5 s
Summary plot#
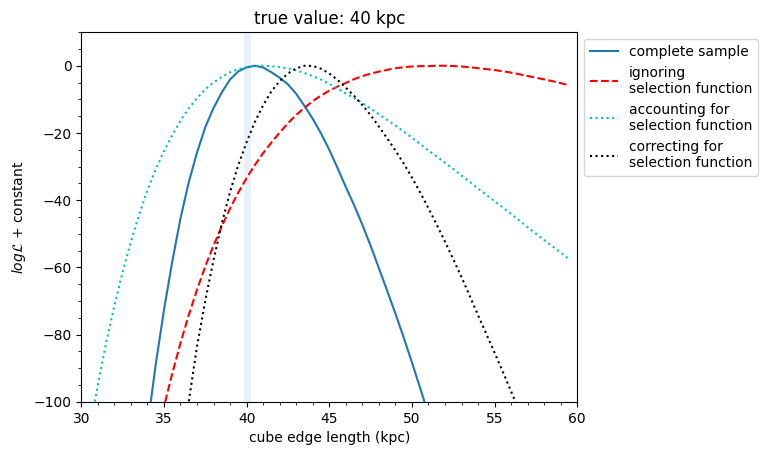
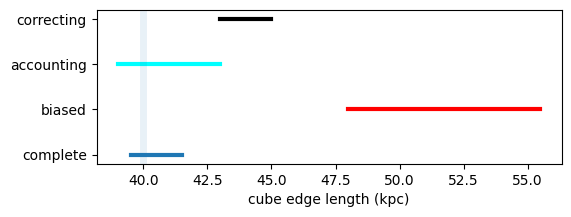
Here we summarise the results we obtained through different methods. When using the complete sample of simulated stars, we easily recover the correct answer. Ignoring the the sample incompleteness provides a biased result.
We also estimate the 95% confidence interval, as the interval containing 95% of the total likelihood.
Accounting for the selection function in a forward model is the best approach: we recover the correct answer, albeit with larger uncertainties because we have a smaller number of stars that in the complete case.
plt.figure()
plt.plot( cube_sizes_to_try , all_log_L - max(all_log_L) , c='C0' ,
label='complete sample')
plt.plot( cube_sizes_to_try , all_log_L_biased - max(all_log_L_biased) , 'r--' ,
label='ignoring\nselection function')
plt.plot( cube_sizes_to_try , all_log_L_withsf - max(all_log_L_withsf) , 'c:' ,
label='accounting for\nselection function')
plt.plot( cube_sizes_to_try , all_log_L_correctedcounts - max(all_log_L_correctedcounts) , 'k:',
label='correcting for\nselection function')
plt.xlim(30,60)
plt.ylim(-100,10)
plt.plot([2*halfSizeCube,2*halfSizeCube],[-100,10],lw=5,alpha=0.1)
plt.ylabel('$log \mathcal{L}$ + constant')
plt.xlabel('cube edge length (kpc)')
plt.minorticks_on()
plt.legend(bbox_to_anchor=(1, 1), loc='upper left')
plt.title('true value: %i kpc' % (2*halfSizeCube))
def find_N_percent_interval(loglikelihoods,N=95):
"""
Input: numpy array of log-likelihood
Output: boolean numpy array with True if a point is within the N% confidence interval
(default N=95%)
"""
sorted_likelihoods = sorted( np.exp(loglikelihoods-max(loglikelihoods)) )
iii=1
while sum(sorted_likelihoods[-iii:]) < (N/100.)*sum(sorted_likelihoods):
iii+=1
# the iii top points combine for over 95% of the likelihood
# their indices are:
ind = np.argpartition(loglikelihoods, -iii)[-iii:]
mask95 = np.array([False for lll in loglikelihoods])
mask95[ind] = True
return mask95
plt.figure(figsize=(6,2))
mask95 = find_N_percent_interval(all_log_L,95)
plt.plot( cube_sizes_to_try[mask95] , 1.*np.ones_like(cube_sizes_to_try)[mask95] , c='C0', lw=3)
mask95 = find_N_percent_interval(all_log_L_biased,95)
plt.plot( cube_sizes_to_try[mask95] , 2.*np.ones_like(cube_sizes_to_try)[mask95] , c='r', lw=3)
mask95 = find_N_percent_interval(all_log_L_withsf,95)
plt.plot( cube_sizes_to_try[mask95] , 3.*np.ones_like(cube_sizes_to_try)[mask95] , c='cyan', lw=3)
mask95 = find_N_percent_interval(all_log_L_correctedcounts,95)
plt.plot( cube_sizes_to_try[mask95] , 4.*np.ones_like(cube_sizes_to_try)[mask95] , c='k', lw=3)
plt.plot([2*halfSizeCube,2*halfSizeCube],[-100,10],lw=5,alpha=0.1)
plt.yticks([1,2,3,4],['complete','biased','accounting','correcting'])
plt.xlabel('cube edge length (kpc)')
plt.ylim(0.8,4.2)
(0.8, 4.2)